다이어그램 및 구성도 소개
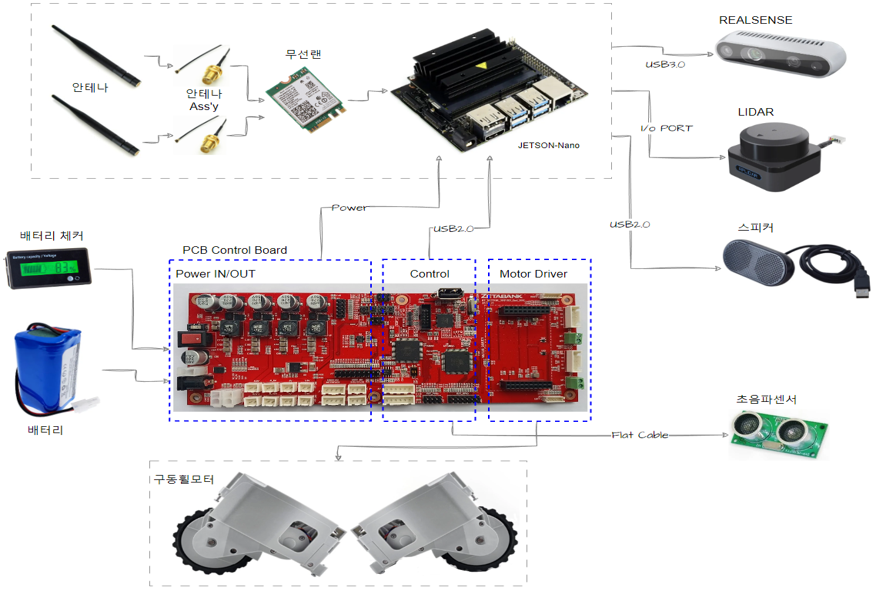
전체 다이어그램
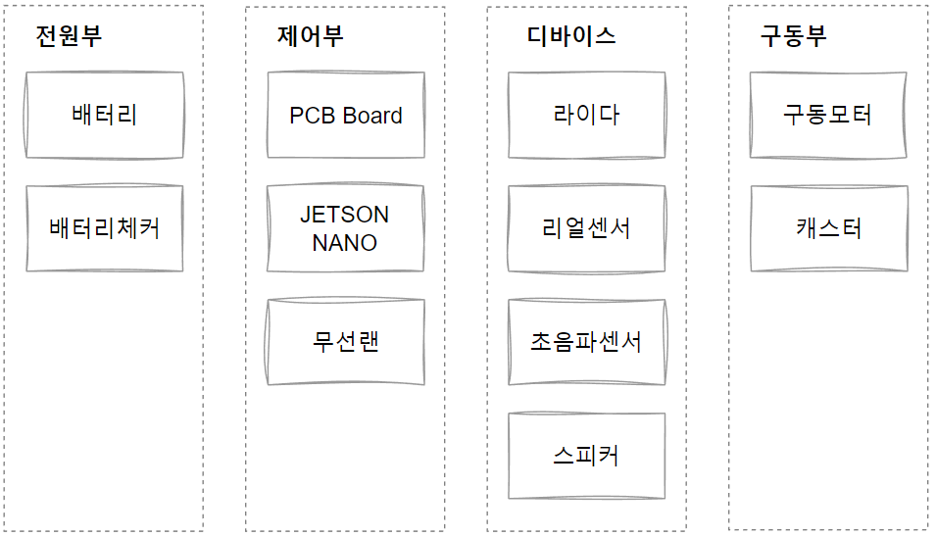
- 전원부
배터리, 배터리체커로 구성
- 제어부
PCB Board : 배터리로 부터 전원을 받아 모터, 디바이스 등에 전원 분배
젯슨 나노 : ROS를 통해 각 디바이스와 구동부를 제어하는 역할
무선랜 : 외부 PC에서 연결할 수 있도록 하는 역할
- 디바이스
라이다 : 자율주행에 필요한 주위 환경과 장애물 감지에 필요한 데이터 수집
카메라 : 정면 객체 인식, AI 교육에 사용
초음파센서 : 라이다가 감지하지 못한 정면 근거리의 물체 감지하는 역할
스피커 : 음악 재생 및 소리 표출
- 구동부
구동모터 : 로봇의 이동을 책임지는 메인 장치, 전후좌우 이동 및 제자리 회전 가능
캐스터 : 보조바퀴로 주행 중 로봇의 안정감을 더해주며 방향 전환에 도움을 줌
통합보드 다이어그램
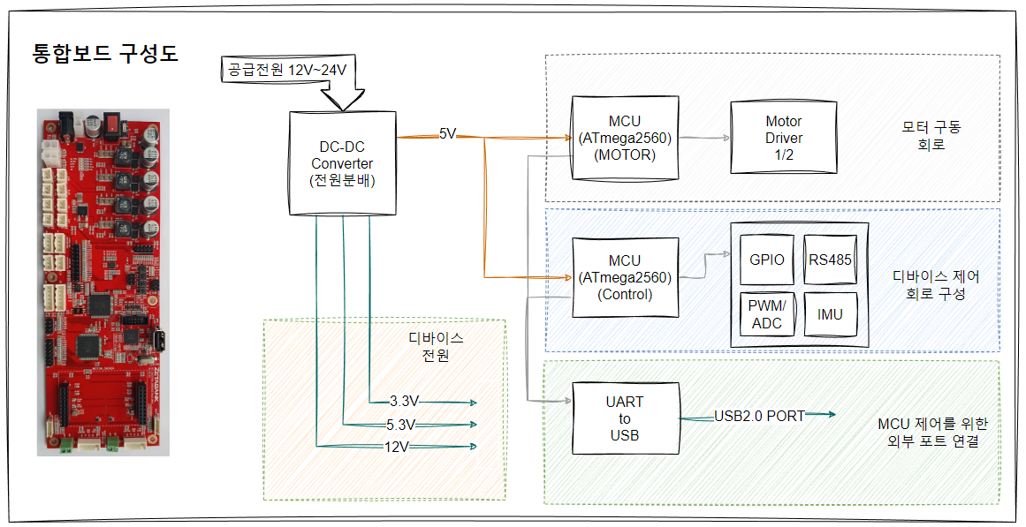
배터리로 부터 전원을 공급받아 구동부 및 디바이스로 전원 분배
컨버터를 통해 각 부품에 필요한 전원에 맞게 변환하여 제공
각 센서들로부터 데이터를 받아 젯슨나노로 전송